300+ câu trắc nghiệm Kỹ thuật cảm biến có đáp án chi tiết - Đề 2
50 câu hỏi 60 phút
Nhấn để lật thẻ
1 / 50
Đại lượng (m) là đại lượng cần đo của cảm biến được biểu diễn bởi hàm s=F(m) thì:
A.
(m) là đại đầu ra
B.
(m) là đầu vào
C.
(m) là phản ứng của cảm biến
D.
(m) là đại điện
Đáp án
Đáp án đúng: B
Trong biểu thức s=F(m), 'm' là đại lượng cần đo, và nó là đầu vào của cảm biến. Hàm F biểu diễn mối quan hệ giữa đại lượng đo (đầu vào) và tín hiệu đầu ra 's' của cảm biến.
Danh sách câu hỏi:
Lời giải:
Đáp án đúng: B
Trong biểu thức s=F(m), 'm' là đại lượng cần đo, và nó là đầu vào của cảm biến. Hàm F biểu diễn mối quan hệ giữa đại lượng đo (đầu vào) và tín hiệu đầu ra 's' của cảm biến.
Lời giải:
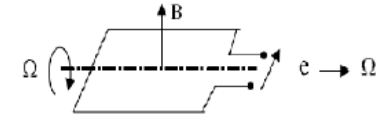
Đáp án đúng: D
Cảm biến đo tốc độ chuyển động quay thường được chế tạo dựa trên hiệu ứng cảm ứng điện từ. Khi một vật dẫn điện (thường là một đĩa kim loại có răng cưa) quay trong từ trường, nó sẽ tạo ra một dòng điện cảm ứng. Tần số của dòng điện cảm ứng này tỉ lệ thuận với tốc độ quay. Bằng cách đo tần số này, ta có thể xác định được tốc độ quay. Các hiệu ứng quang điện, quang-điện từ và áp điện ít được sử dụng hơn trong các cảm biến đo tốc độ quay thông thường.
Lời giải:
Đáp án đúng: D
Hình vẽ mô tả nguyên lý hoạt động của cảm biến áp điện. Khi có áp lực tác động lên vật liệu áp điện, nó sẽ tạo ra điện tích. Hiệu ứng này được gọi là hiệu ứng áp điện.
Lời giải:
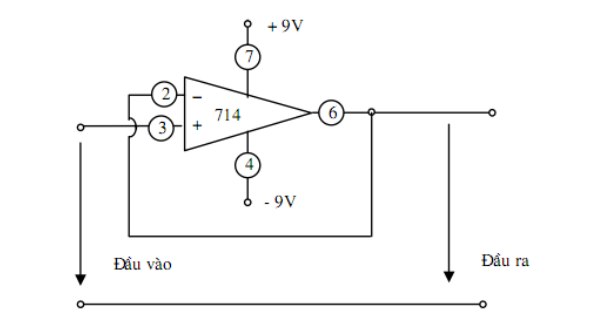
Đáp án đúng: B
Hình vẽ mô tả sơ đồ mạch khuếch đại thuật toán (Operational Amplifier - Op-Amp). Mạch khuếch đại thuật toán là một bộ khuếch đại điện áp một chiều có hệ số khuếch đại rất lớn, thường được sử dụng để thực hiện các phép toán số học (như cộng, trừ, nhân, chia, tích phân, vi phân) trong các mạch điện tử.
Lời giải:
Đáp án đúng: A
Phương trình chuyển đổi trong lĩnh vực cảm biến mô tả mối quan hệ giữa đại lượng đầu vào (đại lượng vật lý hoặc hóa học cần đo) và đại lượng đầu ra (thường là tín hiệu điện). Đáp án 1 chính xác nêu rõ định nghĩa này. Các đáp án khác không chính xác vì chúng mô tả mối quan hệ giữa các đại lượng khác không liên quan trực tiếp đến quá trình chuyển đổi của cảm biến.
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
.PNG)
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
.PNG)
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
.PNG)
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
.PNG)
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP