Đề thi thử Đánh giá năng lực ĐHQG Hà Nội năm 2025 - Đề 5 - Đề 3
17 câu hỏi 60 phút
Khi thực hiện khảo sát dao động của con lắc đơn, một học sinh đo được kết quả vào biểu diễn trên đồ thị hình vẽ. Tuy nhiên, do sơ suất nên lại không kí hiệu các đại lượng lên trên trục tọa độ. Hãy xác định các đại lượng trên trục Ox và Oy.
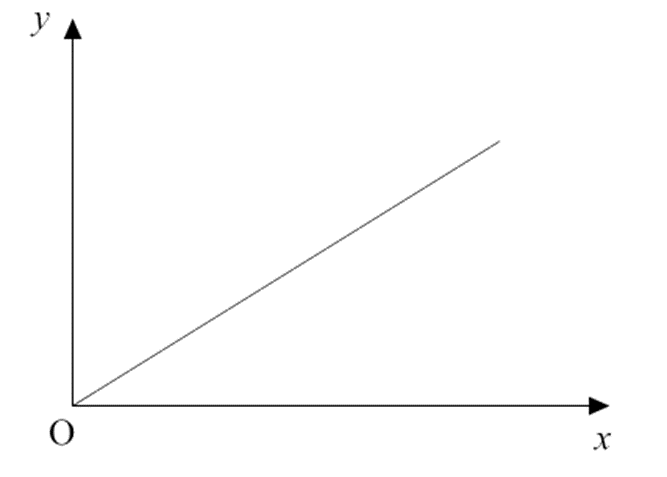
Trục Ox là chiều dài con lắc, Oy là bình phương chu kì dao động
Trục Ox là chiều dài con lắc, Oy là chu kì dao động
Trục Ox là khối lượng con lắc, Oy là bình phương chu kì dao động
Trục Ox là khối lượng con lắc, Oy là chu kì dao động
Ta có mối liên hệ trong dao động của con lắc đơn về chiều dài và chu kì dao động của con lắc như sau: \(T=2\pi \sqrt{\frac{l}{g}}\)
\(\Leftrightarrow {{T}^{2}}=4{{\pi }^{2}}\frac{l}{g}\) (1)
\(\Rightarrow {{T}^{2}}\siml\)
Hay ta thấy (1) có sự tương đồng với hàm số: y = ax
⇒ Từ đó ta kết lụân được rằng: Ox là chiều dài con lắc, Oy là bình phương chu kì dao động.
Danh sách câu hỏi:
Ta có mối liên hệ trong dao động của con lắc đơn về chiều dài và chu kì dao động của con lắc như sau: \(T=2\pi \sqrt{\frac{l}{g}}\)
\(\Leftrightarrow {{T}^{2}}=4{{\pi }^{2}}\frac{l}{g}\) (1)
\(\Rightarrow {{T}^{2}}\siml\)
Hay ta thấy (1) có sự tương đồng với hàm số: y = ax
⇒ Từ đó ta kết lụân được rằng: Ox là chiều dài con lắc, Oy là bình phương chu kì dao động.
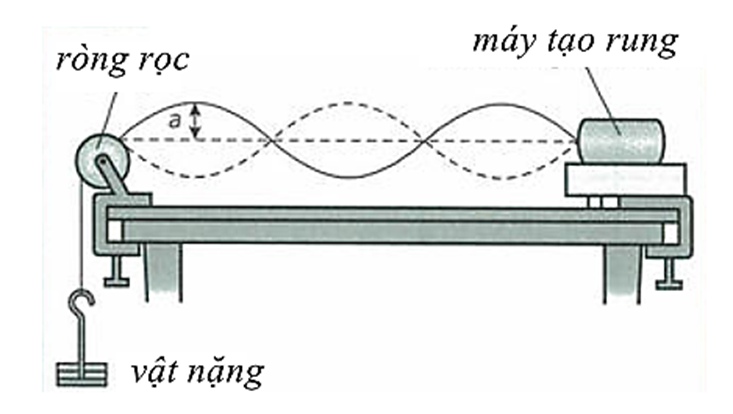
Bộ giảm xóc trên xe máy, hay ô tô là ứng dụng của dao động tắt dần. Đây là một phần quan trọng của xe máy, giúp giảm những rung chấn khi gặp phải ổ gà hoặc đường xấu, mang lại cảm giác thoải mái và êm ái khi điều khiển xe.
Câu 3:
Một chiếc võng đang đung đưa, chu kỳ dao động của chiếc võng được xác định là khoảng thời gian:
Ta có: Chu kỳ dao động là thời gian để vật thực hiện một dao động toàn phần từ vị trí này qua vị trí cân bằng và trở lại vị trí ban đầu.
Khi chiếc võng đung đưa, nó sẽ đi qua vị trí cân bằng ở một hướng, sau đó đi qua vị trí cân bằng ở hướng ngược lại, và thời gian giữa hai lần đi qua vị trí cân bằng ở cùng một hướng chính là chu kỳ dao động của chiếc võng.
Công suất trung bình cung cấp cho bệnh nhân là: \(P=\frac{A}{t}=\frac{{{6.10}^{2}}}{2,{{5.10}^{-3}}}=2,{{4.10}^{5}}~\text{W}\)
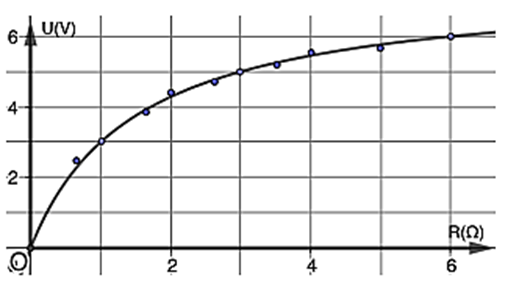
Xét đồ thị hình vẽ:
khi \(\left\{ \begin{array}{*{35}{l}}
U=3V \\
R=1\Omega \\
\end{array}\Rightarrow I=\frac{U}{R}=\frac{3}{1}=3A \right.\)
khi \(\left\{ \begin{array}{*{35}{l}}
U=6V \\
R=6\Omega \\
\end{array}\Rightarrow I=\frac{U}{R}=\frac{6}{6}=1A \right.\)
Áp dụng công thức tính suất điện động: .\(E=I\left( {{R}_{N}}+r \right)\).
\(\Rightarrow \left\{ \begin{array}{*{35}{l}}
E=6+r \\
E=3+3r \\
\end{array}\Rightarrow \left\{ \begin{array}{*{35}{l}}
E=7,5V \\
r=1,5\Omega \\
\end{array} \right. \right.\)