Hàm truyền của hiệu chỉnh vi phân tỉ lệ PD (proportional derivative) liên tục có dạng:
Trả lời:
Đáp án đúng: B
Hàm truyền của bộ điều khiển PD (Proportional Derivative) liên tục có dạng \({G_C}(s) = {K_p} + {K_D}s\), trong đó \({K_p}\) là hệ số усиления tỉ lệ (Proportional gain) và \({K_D}\) là hệ số усиления vi phân (Derivative gain). Phần tỉ lệ (\({K_p}\)) tạo ra một tín hiệu điều khiển tỉ lệ với sai lệch, trong khi phần vi phân (\({K_D}s\)) tạo ra một tín hiệu điều khiển tỉ lệ với tốc độ thay đổi của sai lệch.
Bộ 200+ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động có đáp án được tracnghiem.net chọn lọc và chia sẻ dưới đây, nhằm giúp các bạn sinh viên có thêm tư liệu tham khảo!
50 câu hỏi 60 phút
Câu hỏi liên quan
Lời giải:
Đáp án đúng: D
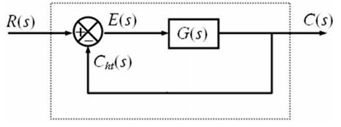
Hàm truyền vòng kín của hệ thống hồi tiếp âm đơn vị (H(s) = 1) được tính bằng công thức G(s) / (1 + G(s)). Trong đó, G(s) là hàm truyền của hệ hở.
Lời giải:
Đáp án đúng: A
Để tìm hàm truyền của hệ thống, ta sử dụng công thức tổng quát cho hệ thống có hồi tiếp. Tín hiệu đi thẳng có hai đường: G1*G3 và G2*G3. Hệ số hồi tiếp là -1. Áp dụng công thức hàm truyền G(s) = (Tổng các đường đi thẳng) / (1 - (Tổng các vòng kín)). Trong trường hợp này: G(s) = (G1*G3 + G2*G3) / (1 + (G1*G3 + G2*G3)).
Lời giải:
Đáp án đúng: A
Khâu PI (Proportional-Integral) được sử dụng trong điều khiển tự động để cải thiện cả đáp ứng quá độ và sai số xác lập. Thành phần P (tỷ lệ) giúp tăng tốc độ đáp ứng, nhưng không loại bỏ hoàn toàn sai số xác lập. Thành phần I (tích phân) giúp loại bỏ sai số xác lập bằng cách tích lũy sai số theo thời gian và điều chỉnh đầu ra cho đến khi sai số bằng 0. Tuy nhiên, việc thêm thành phần I có thể làm chậm đáp ứng quá độ và tăng độ vọt lố. Do đó, khâu hiệu chỉnh PI làm chậm đáp ứng quá độ, giảm sai số xác lập (nhờ thành phần I), và có thể làm tăng hoặc giảm độ vọt lố tùy thuộc vào việc điều chỉnh các tham số của khâu PI. Trong các lựa chọn đưa ra, lựa chọn gần đúng nhất là làm chậm đáp ứng quá độ, giảm độ vọt lố (trong một số trường hợp) và giảm sai số xác lập.
Lời giải:
Đáp án đúng: A
Trong hệ phương trình trạng thái:
* `x(t)` là vector trạng thái (n x 1)
* `r(t)` là vector đầu vào (m x 1)
* `c(t)` là vector đầu ra (thường là 1 x 1, biểu diễn một tín hiệu đầu ra đơn)
* `A` là ma trận trạng thái (n x n)
* `B` là ma trận đầu vào (n x m)
* `C` là ma trận đầu ra.
Vì `c(t) = Cx(t)` và `x(t)` là ma trận (n x 1), để phép nhân ma trận có nghĩa và `c(t)` là một đại lượng vô hướng (1x1) thì `C` phải là ma trận (1 x n).
* `x(t)` là vector trạng thái (n x 1)
* `r(t)` là vector đầu vào (m x 1)
* `c(t)` là vector đầu ra (thường là 1 x 1, biểu diễn một tín hiệu đầu ra đơn)
* `A` là ma trận trạng thái (n x n)
* `B` là ma trận đầu vào (n x m)
* `C` là ma trận đầu ra.
Vì `c(t) = Cx(t)` và `x(t)` là ma trận (n x 1), để phép nhân ma trận có nghĩa và `c(t)` là một đại lượng vô hướng (1x1) thì `C` phải là ma trận (1 x n).
Lời giải:
Đáp án đúng: C
Bộ chuyển đổi D/A (Digital-to-Analog Converter) thực hiện chức năng chuyển đổi tín hiệu số (digital) sang tín hiệu tương tự (analog). Các phương án khác không mô tả đúng chức năng này.
* Phương án 1 mô tả bộ chuyển đổi A/D (Analog-to-Digital Converter).
* Phương án 3 không chính xác vì bộ chuyển đổi D/A không phải là khâu lấy mẫu dữ liệu.
* Phương án 4 có thể đúng trong một số ứng dụng, nhưng không phải là định nghĩa chính xác và tổng quát nhất về bộ chuyển đổi D/A.
* Phương án 1 mô tả bộ chuyển đổi A/D (Analog-to-Digital Converter).
* Phương án 3 không chính xác vì bộ chuyển đổi D/A không phải là khâu lấy mẫu dữ liệu.
* Phương án 4 có thể đúng trong một số ứng dụng, nhưng không phải là định nghĩa chính xác và tổng quát nhất về bộ chuyển đổi D/A.
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP
Lời giải:
Bạn cần đăng ký gói VIP để làm bài, xem đáp án và lời giải chi tiết không giới hạn. Nâng cấp VIP





